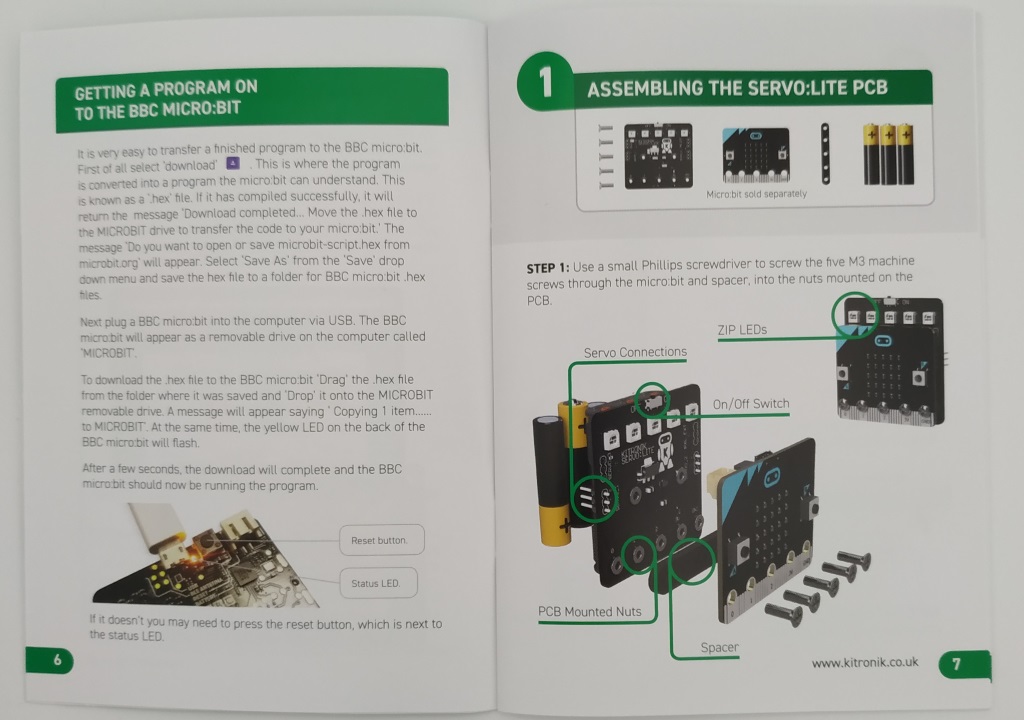
Le robot MOVE mini pour micro:bit fonctionne grâce à la carte Servo:Lite, que je vous ai déjà présenté il y a un peu plus d’un an. Le Kit contient également le châssis, les vis, 2 servomoteurs à rotation continue et même les piles.
Par soucis de transparence, je précise que les boutiques MCHobby et Kitronik m’ont envoyé gratuitement les différents éléments présenté ici (pour que j’en parle dans mon livre).

Le manuel est en anglais, mais les explications sont très claire et le montage n’est pas bien compliqué.
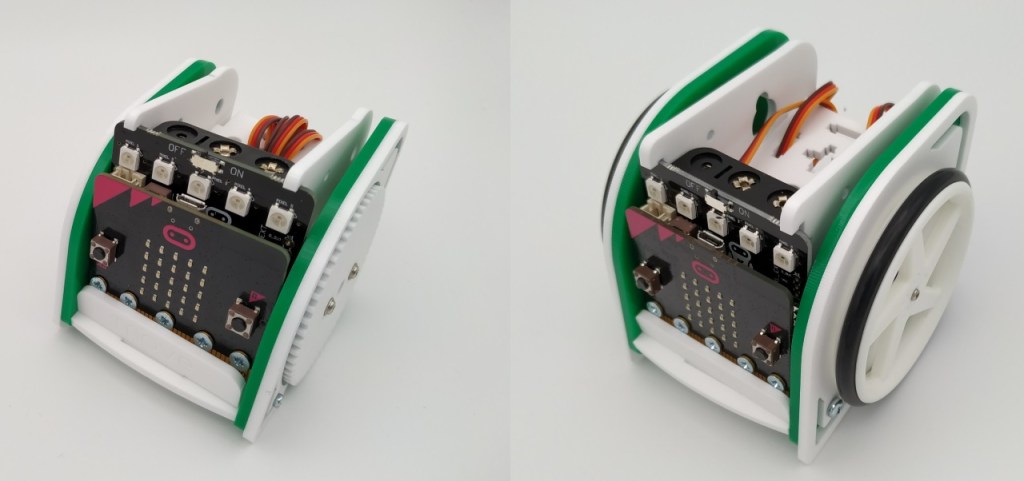
Les 2 versions du robot MOVE
Il est maintenant difficile de trouver l’ancienne version du robot. Elle était légèrement plus petite et possédait des roues dentelées (sans bande de caoutchouc). Le nouveau modèle possède une meilleure adhérence, mais cela ne suffit pas pour justifier de racheter une version 2 lorsque vous possédez déjà la 1ère.
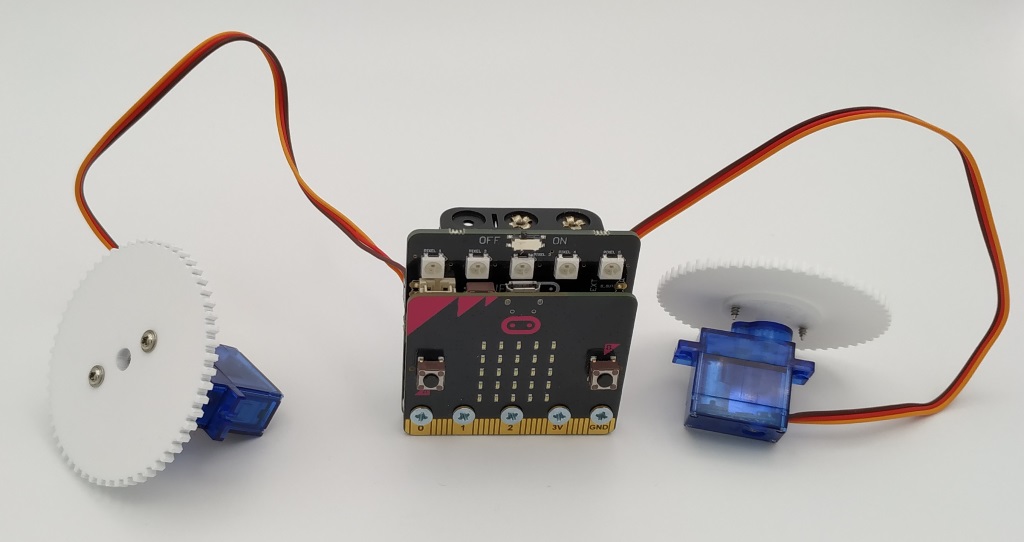
Le servomoteur à rotation continue
Il s’agit d’un servomoteur classique qui a été modifié. Normalement, le servomoteur tourne dans un sens ou dans l’autre et s’arrête lorsque sa position est atteinte (généralement un angle entre 0 et 180°). Mais le servomoteur à rotation continue ne reçoit jamais l’ordre de s’arrêter.
Il se programme exactement comme un servomoteur classique, mais il faut simplement savoir que :
- Si l’angle est inférieur à 90°, le moteur tourne dans un sens
- Si l’angle est égal à 90°, il s’arrête
- Si l’angle est supérieur à 90°, il tourne dans l’autre sens
- Plus on s’éloigne de l’angle 90° et plus le moteur tourne vite
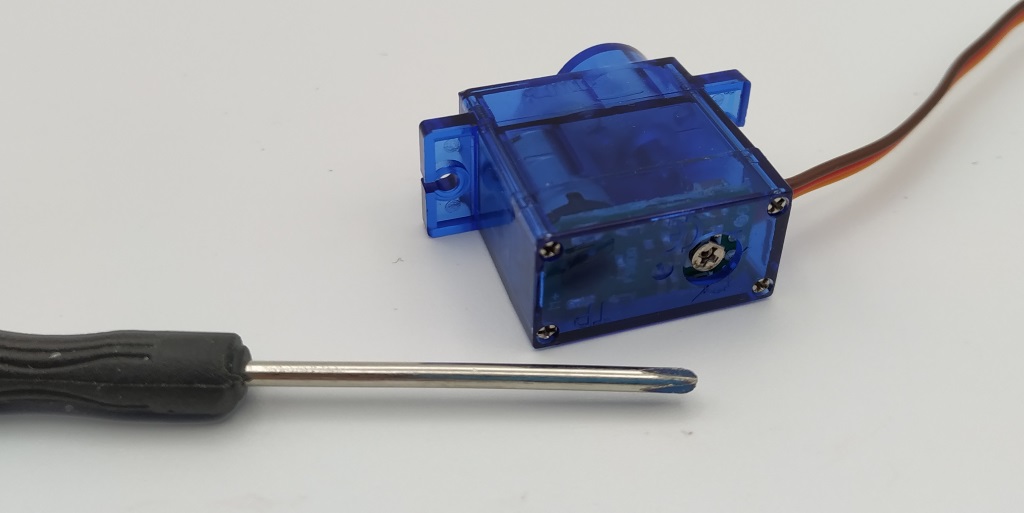
La calibration
Mais ça, c’est la théorie. Dans la pratique la pratique ce n’est pas aussi simple car le moteur doit être calibré pour s’arrêter réellement à 90°.
Avant le montage du robot, reliez les servomoteurs à la carte Servo:Lite et demandez aux moteurs de tourner dans un sens, puis de s’arrêter.
Si le moteur bourdonne ou tourne encore un peu, il faut régler le potentiomètre (la petite tête de vis) situé en dessous du servomoteur à rotation continue (les servomoteurs classiques n’en ont pas).
La procédure de calibration est décrite (en anglais) sur le site de Kitronik. Une fois le bon réglage trouvé, je vous conseille de bloquer le potentiomètre avec une petite goutte de colle chaude. Sinon, il risque de se dérégler au bout d’un moment (à cause des vibrations) et vous serez obligé de le démonter pour le calibrer de nouveau.
Les extensions disponibles
De nombreuses extensions permettent d’ajouter des fonctions amusantes au robot MOVE.
Attention : Si vous achetez une extension, vérifiez qu’elle est adaptée à votre version du robot (v1 ou v2) car elles ne sont généralement pas compatibles avec les 2 version (à cause de la taille légèrement différente des robots).
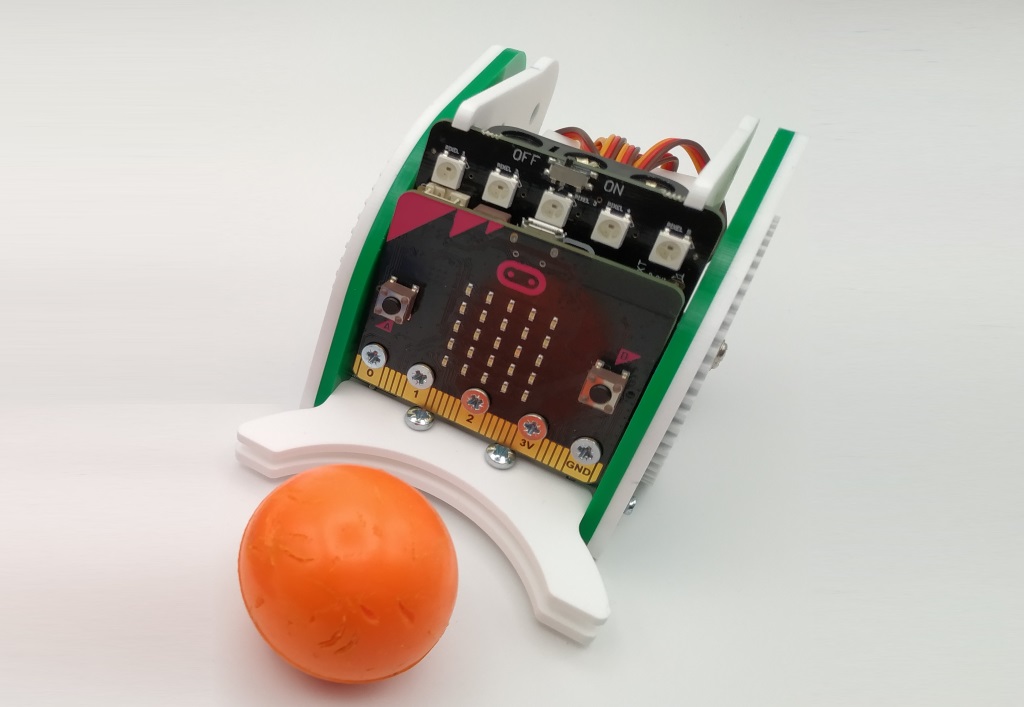
Le pare choc permet de pousser une balle (par exemple, pour faire un match de foot avec plusieurs robots).
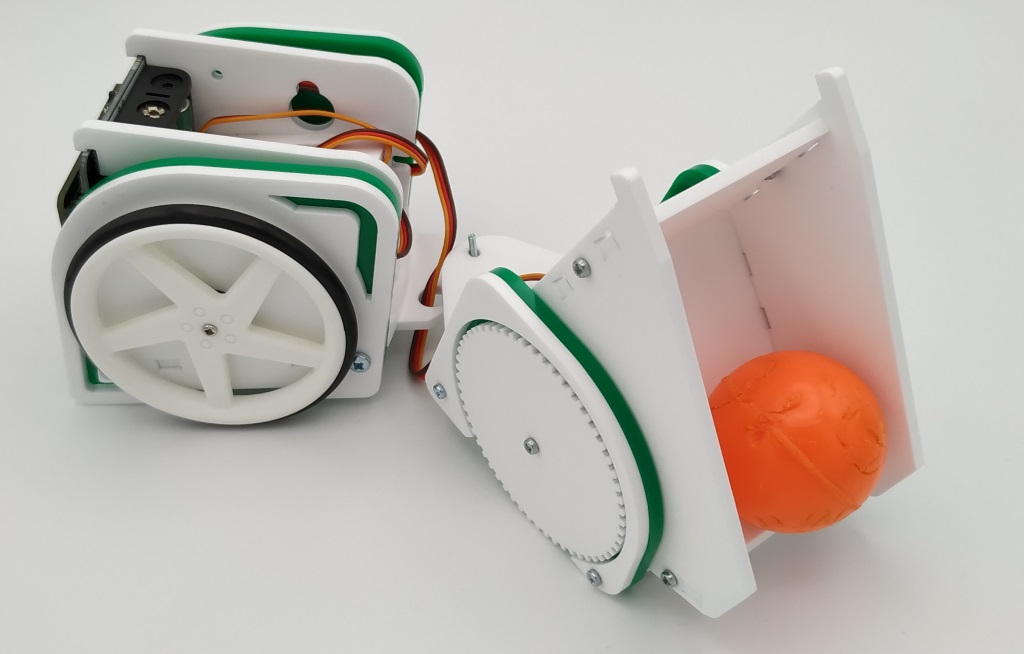
La remorque à bascule fonctionne en activant le 3ème servomoteur.
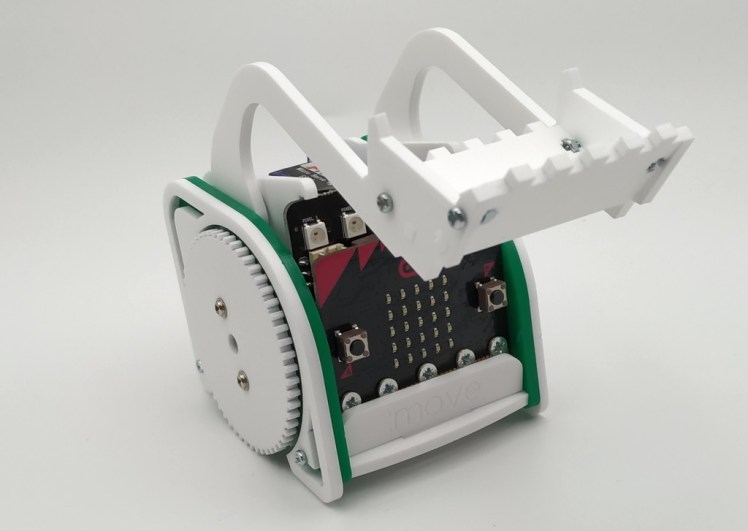
Le bulldozer ajoute une pelle (contrôlée comme la remorque par un 3ème servomoteur)
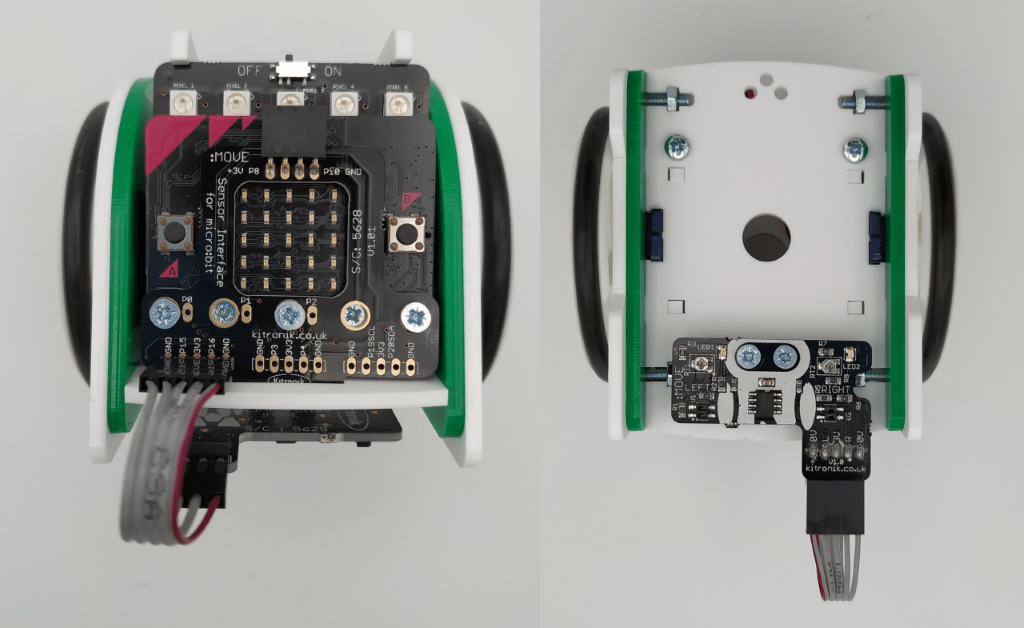
L’extension suivi de ligne permet au robot de suivre une ligne noire sur fond blanc (ou blanche sur fond noir).
Pour en savoir plus…
Vous trouverez beaucoup plus de détail, aussi que des exemples de code dans le sixième chapitre de mon livre (consacré au micro:bit).

Quant au robot MOVE mini, il est bien sûr disponible chez MC Hobby

Une réflexion sur “MOVE mini pour micro:bit”