Il y a 2 semaines, je vous présentais le kit CyberPi Go (composé du CyberPi et du Pocket Shield). Comme vous l’avez vu, la carte de base est déjà très intéressante. Mais ce n’est pas tout, elle offre également de nombreuses possibilités d’extension, à condition bien sûr de posséder les modules compatibles. Le CyberPi innovation add-on pack regroupe 3 capteurs mBuild (potentiomètre, tactile et ultrason), un servomoteur, un moteur à courant continu et un ruban de 15 LED.

Le kit CyberPi Go et le CyberPi innovation add-on pack m’ont été fourni gratuitement par Technologie Services. Nous pouvons donc considérer que cet article est sponsorisé, cependant je n’ai reçu aucune instruction ou rémunération de leur part. L’entreprise m’a seulement proposé d’en parler dans mon blog.
Les connecteurs
- Les connecteurs à 2 broches du Pocket Shield (M1 et M2) sont conçus pour brancher des moteurs à courant continu, mais tous ne sont pas compatibles (voir un peu plus loin dans l’article).
- Les connecteurs à 3 broches du Pocket Shield (S1 et S2) peuvent alimenter des périphériques un peu plus « intelligents » comme par exemple des LED adressables (de type Neopixel) ou des servomoteurs. Ils possèdent une alimentation (bornes + et -) et un port pour transmettre des données.
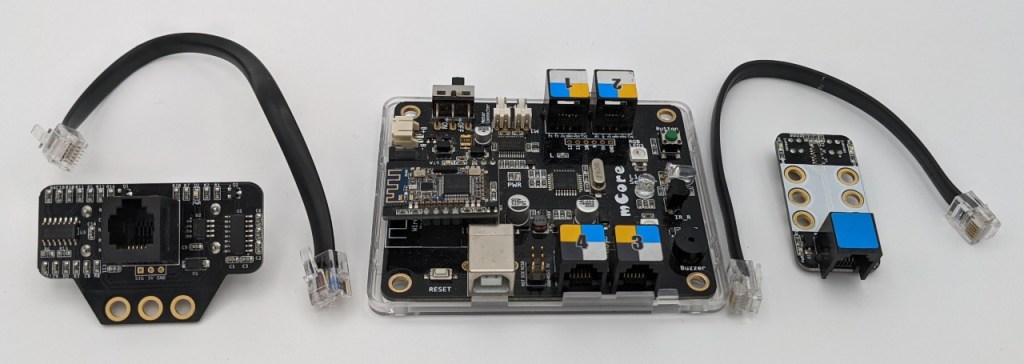
- Le CyberPi possède également un connecteur mBuild. Il permet de communiquer avec la nouvelle gamme de modules Makeblock. Il n’y a qu’une seule prise, mais comme les modules peuvent être chainés entre eux, vous pouvez utiliser une dizaine de modules simultanément. Au delà, je ne sais pas ce qui se passe mais il semble que le protocole de communication est prévu pour en gérer largement plus (toutefois, il faudrait une alimentation plus puissante).

Les anciens modules Makeblock (au format RJ25) ne sont pas malheureusement pas compatibles. Le connecteur mBuild simplifie beaucoup les branchements puisse qu’il n’y a plus à se soucier des couleurs correspondantes aux modules. Mais c’est quand même dommage qu’il existe pas d’adaptateurs pour assurer la transition entre les 2 formats.
Ajout des modules dans mBlock
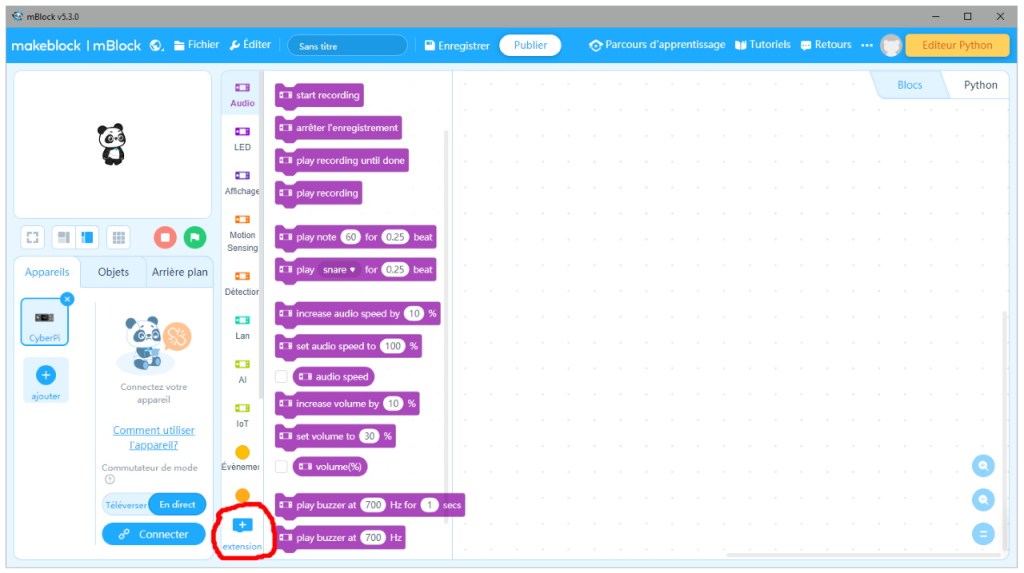
Lorsque vous lancez mBlock, vous disposez seulement des blocs de base. Ils permettent de programmer la carte CyberPi mais pour utiliser les modules, vous devez ajouter les bibliothèques correspondantes. Pour cela cliquez sur extension.
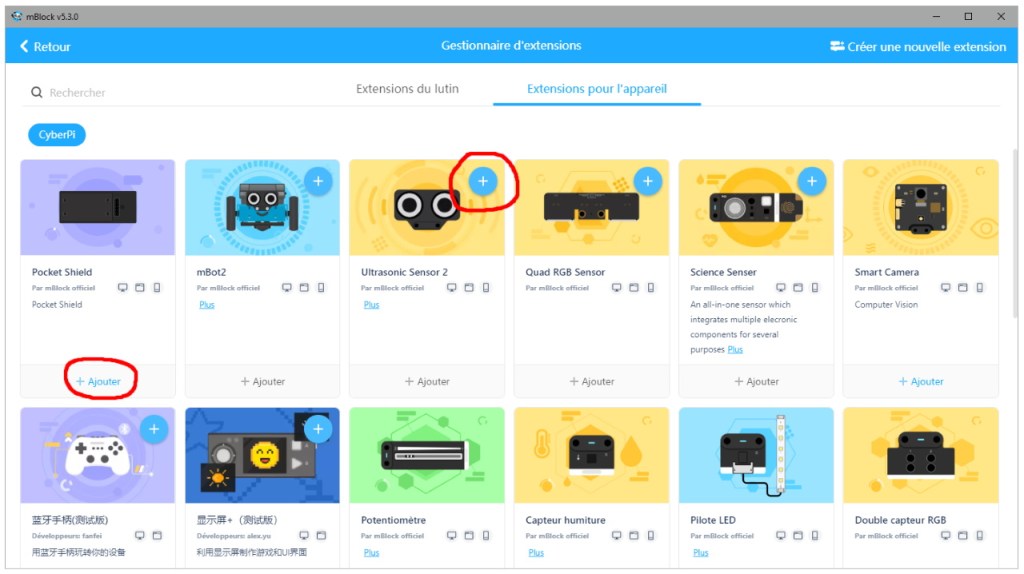
Si vous n’avez jamais utilisé le module, un petit + s’affiche. Cliquez dessus pour télécharger la bibliothèque correspondante et ensuite sur ajouter.
Vous disposez maintenant de nouveaux blocs.
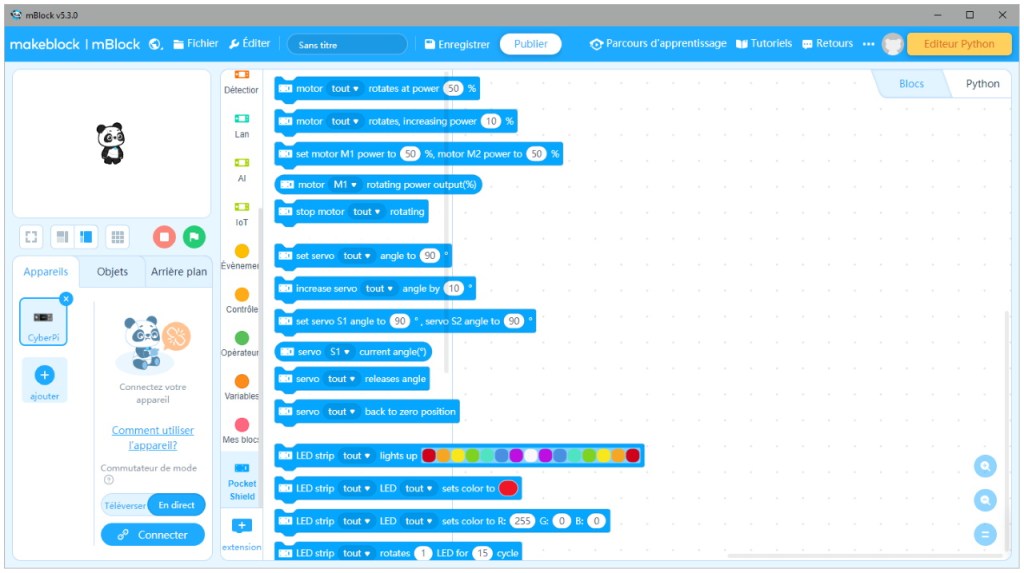
Le ruban de LED
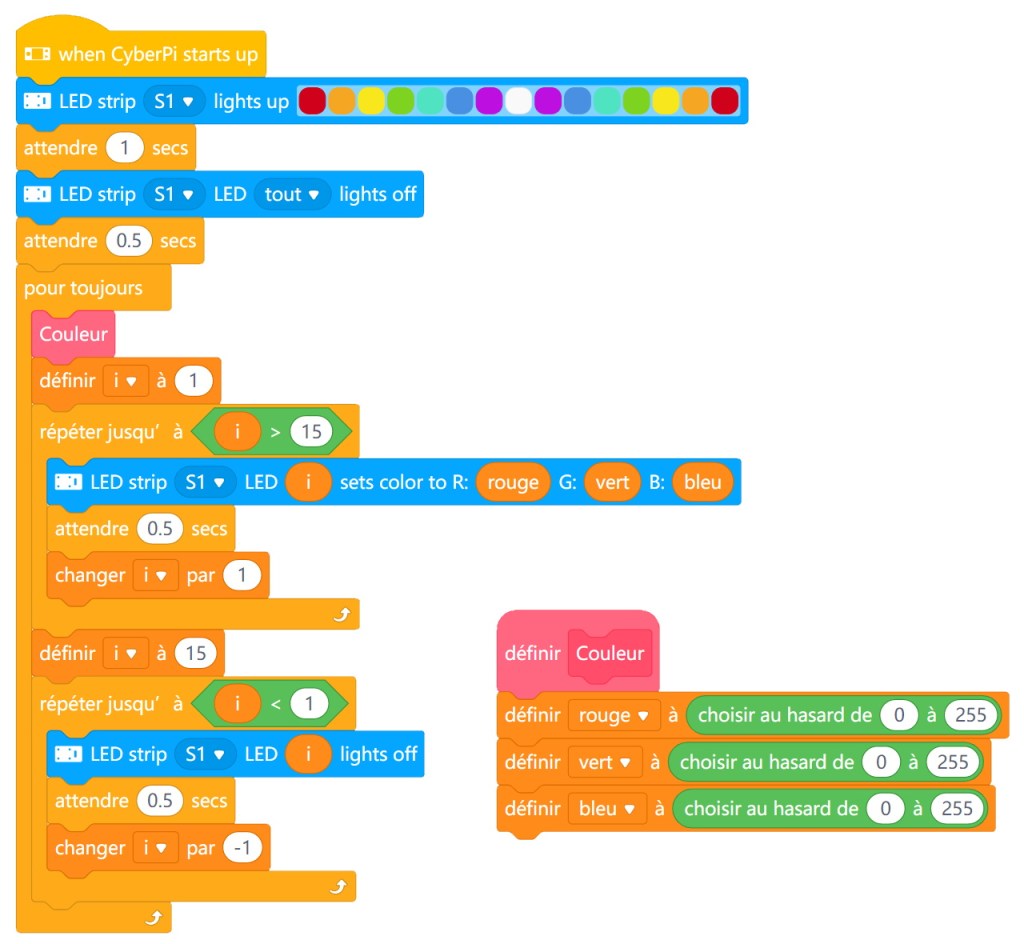
Le module est constitué de 15 LED adressables (de type Neopixel), il nécessite l’installation de la bibliothèque Pocket Shield. La programmation est plutôt intuitive, mais les LED sont numéroté de 1 à 15 (alors qu’habituellement, c’est plutôt de 0 à nombre de LED -1).

Pour le reste, c’est très classique, sélectionnez le connecteur utilisé (S1 ou S2), indiquez la couleur en la sélectionnant ou en donnant la valeur de rouge, de vert et de bleu (entre 0 et 255).
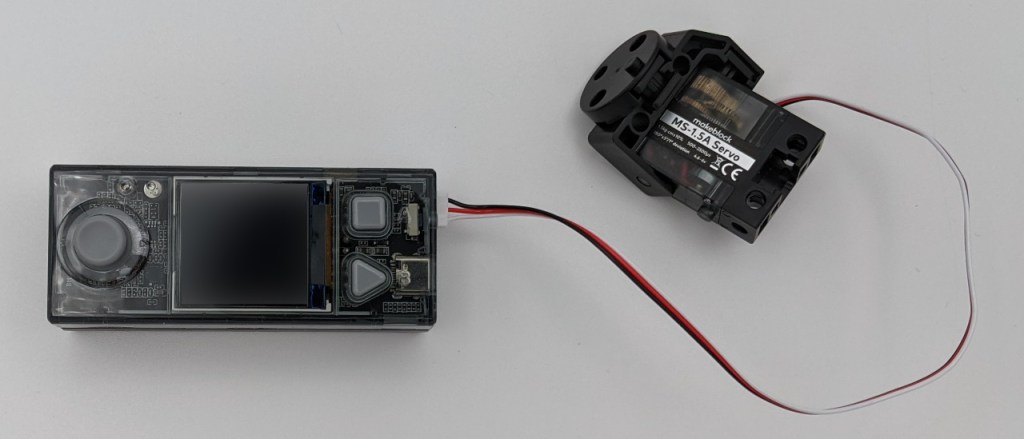
Le servomoteur
Il nécessite également l’installation de la bibliothèque Pocket Shield et utilise les mêmes connecteurs que le ruban de LED. Vous pouvez donc en connecter jusqu’à 2 (ou un seul si vous utilisez aussi le ruban de LED).
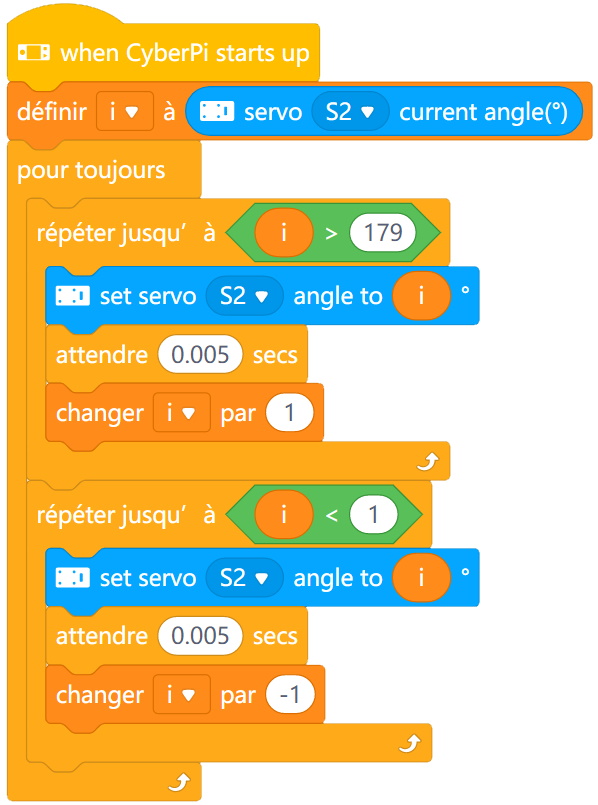
Ensuite, indiquez simplement le connecteur utilisé (S1 ou S2) et l’angle que doit prendre le servo moteur. Pour modifier la vitesse de déplacement vous pouvez jouer sur le temps de pause à l’intérieur de la boucle ou sur la valeur d’incrémentation de la variable i.
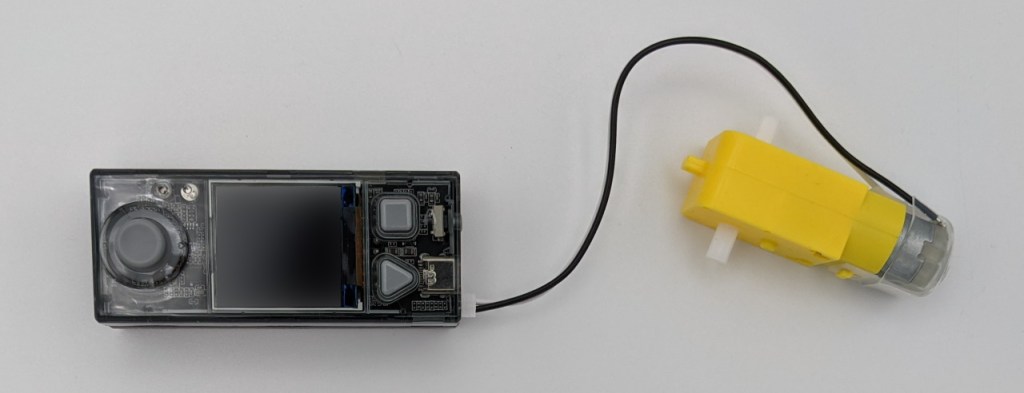
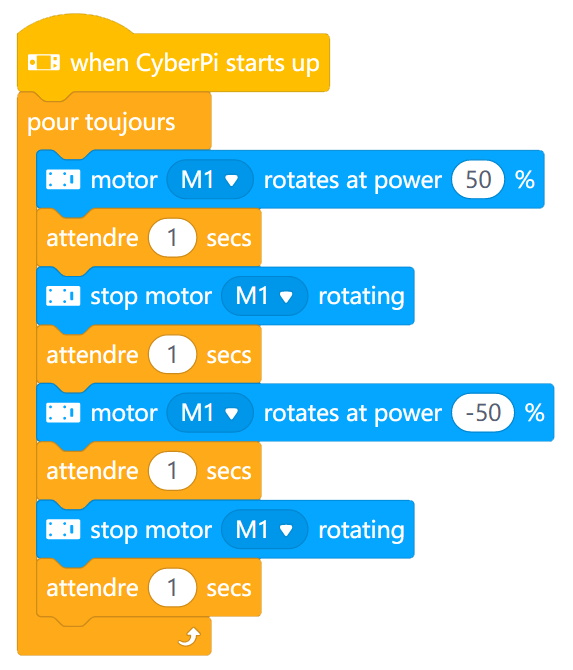
Le moteur à courant continu
Il utilise lui aussi la bibliothèque Pocket Shield, mais il est relié aux connecteurs à 2 broches (M1 ou M2), vous pouvez donc en brancher jusqu’à 2.
Attention, certain moteurs, comme par exemple ceux du robot mBot1 ne sont pas forcement compatibles (certains fonctionnent, mais apparemment, d’autres demandent trop de puissance pour démarrer).
Indiquez simplement quel connecteur est utilisé ainsi que la vitesse de rotation du moteur comprise entre 0 (moteur arrêté) et 100 (vitesse maximum). Si la vitesse de rotation est négative, le moteur tourne en sens inverse.
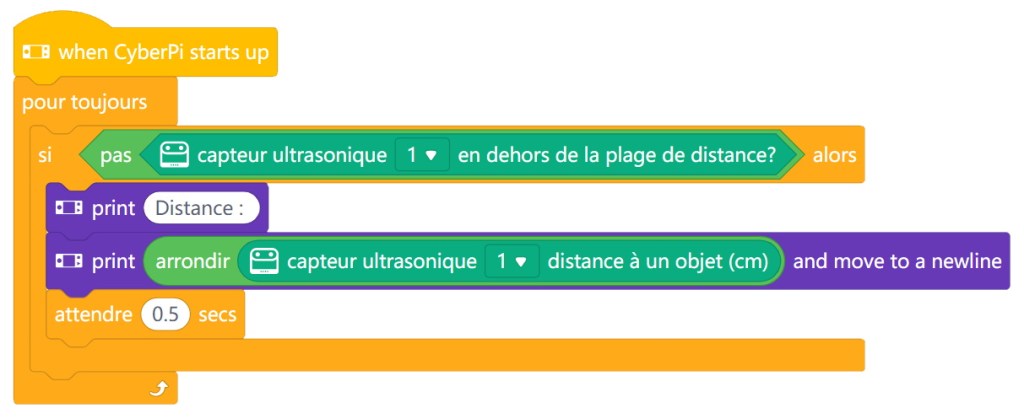
Le capteur à Ultrasons mBuild
Le branchement est très simple, il suffit d’utiliser un câble mBluild. Chaque module possède 2 prises mBuild (pour brancher de nouveaux modules), mais il n’y a pas d’entrée et de sortie prédéfinies. Vous pouvez utiliser n’importe laquelle.

Le capteur à ultrason permet de mesurer la distance qui le sépare d’un obstacle en envoyant régulièrement des ondes sonores et en mesurant le temps que met le son à revenir (c’est le principe de de l’écho). Avant de l’utiliser, il faut ajouter la bibliothèque Capteur ultrasonique (attention, ne le confondez pas avec le capteur Ultrasonic Sensor 2 du robot mBot2).
J’ai rencontré un bug en utilisant ce module avec la version 44.01.005 du firmware. Heureusement le service technique de Technologie Services m’a indiqué comment le résoudre en faisant la mise à jour de la carte directement en WiFi (j’ai mis à jour mon précédent article pour indiquer la procédure à suivre). A partir du firmware 44.01.006, le module fonctionne parfaitement.
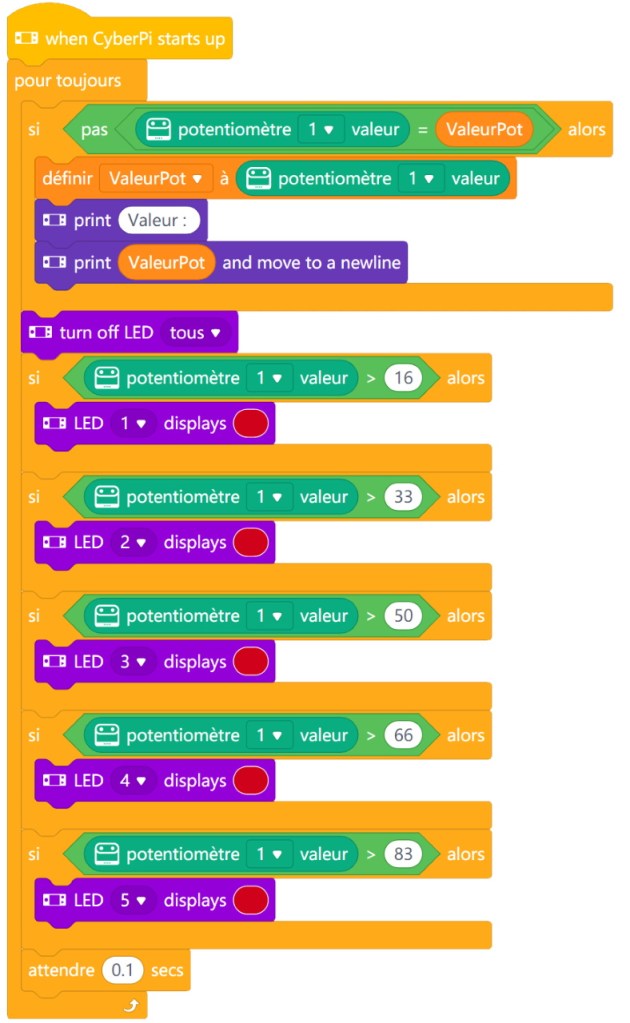
Le potentiomètre à glissière mBuild
Il renvoie une valeur comprise entre 0 et 100, en fonction de la position du bouton sur la glissière. Le potentiomètre se connecte à l’aide d’un câble mBluild.
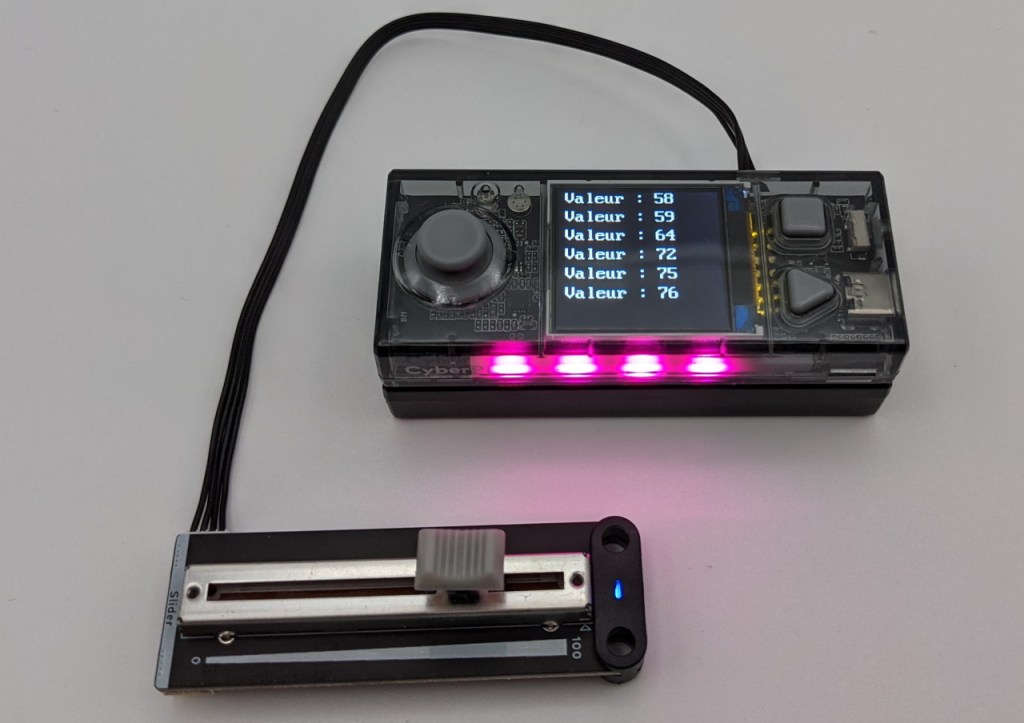
Vous devez installer la bibliothèque Potentiomètre. Elle permet d’obtenir le bloc qui indique la valeur du potentiomètre.
Le capteur tactile mBuild
Le module permet d’obtenir 8 touches supplémentaires.
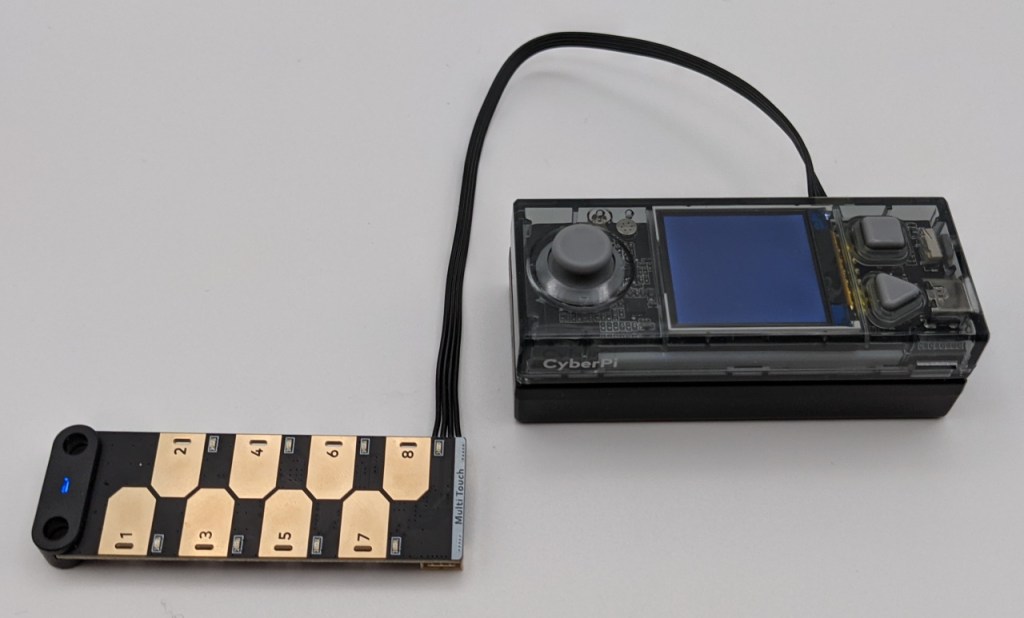
Ajoutez la bibliothèque Multi-touch, connectez le module et vous pourrez fabriquer ce mini piano.

Conclusion
Même si certains modules classiques (moteurs, servomoteurs, ruban de LED) sont parfois utilisables avec le CyberPi, le CyberPi innovation add-on pack permet surtout de découvrir les nouveaux modules mBuild. Il en existe de nombreux autres (au détail ou sous forme de pack), mais ne ratez surtout pas le prochain article, puisque je vous parlerai enfin du robot mBot2.

Bonjour,
Le nombre de voies étant limitées, existe-t-il un add on permettant de piloter 3 moteurs et 3 servomoteurs en même temps ?
Cordialement,
Brice
J’aimeJ’aime
Bonjour,
Il devrait être possible de contrôler un moteur supplémentaire avec le Driver moteur mBuild : https://technologieservices.fr/ts_fr/277346.html
et d’ajouter un servomoteur avec le Driver servomoteur mBuild : https://technologieservices.fr/ts_fr/277349.html
Mais je n’ai pas testé ces modules
J’aimeJ’aime